विकास र निर्माणको म्याग्नाबेन्ड इतिहास
विचारको उत्पत्ति:
1974 मा मलाई घरको इलेक्ट्रोनिक परियोजनाहरूको लागि बक्सहरू बनाउन आवश्यक थियो।यसो गर्नको लागि मैले आफैंलाई एङ्गल आइरनको दुई टुक्राहरूबाट एक धेरै कच्चा शीटमेटल फोल्डर बनाएको छु र एकै ठाउँमा राखेको छु।कम्तिमा भन्नको लागि यो प्रयोग गर्न धेरै अप्ठ्यारो थियो र धेरै बहुमुखी थिएन।मैले चाँडै निर्णय गरें कि यो केहि राम्रो बनाउने समय हो।
त्यसैले मैले 'उचित' फोल्डर कसरी बनाउने भन्ने बारे सोचें।मलाई चिन्तित गर्ने एउटा कुरा यो थियो कि क्ल्याम्पिंग संरचनालाई मेसिनको आधारमा या त छेउमा वा पछाडि बाँध्नु पर्ने थियो र यो मैले बनाउन चाहेको केहि चीजहरूको मार्गमा पुग्न गइरहेको थियो।त्यसोभए मैले विश्वासको छलांग लगाए र भनें ... ठीक छ, क्ल्याम्पिंग संरचनालाई आधारमा बाँध्नु हुँदैन, म कसरी त्यो काम गर्न सक्छु?
त्यो सम्बन्ध तोड्ने कुनै उपाय थियो?
के तपाइँ कुनै वस्तुमा केहि संलग्न नगरी समात्न सक्नुहुन्छ?
त्यो सोध्नको लागी एक हास्यास्पद प्रश्न जस्तो देखिन्थ्यो तर एक पटक मैले यस तरिकाले प्रश्न फ्रेम गरेपछि मैले सम्भावित उत्तर लिएँ: -
तपाईंले तिनीहरूसँग भौतिक सम्बन्ध बिना चीजहरूलाई प्रभाव पार्न सक्नुहुन्छ ... FIELD मार्फत!
मलाई विद्युत क्षेत्र*, गुरुत्वाकर्षण क्षेत्र*, र चुम्बकीय क्षेत्र* बारे थाहा थियो।तर के यो सम्भव हुनेछ?के यसले वास्तवमा काम गर्नेछ?
(* एक तरफको रूपमा यो नोट गर्न रोचक छ कि आधुनिक विज्ञानले "दूरमा बल" वास्तवमा कसरी काम गर्दछ भनेर पूर्ण रूपमा व्याख्या गर्न बाँकी छ)।

त्यसपछि के भयो अझै पनि स्पष्ट सम्झना छ।
म मेरो गृह कार्यशालामा थिएँ र यो मध्यरात पछि र ओछ्यानमा जाने समय थियो, तर मैले यो नयाँ विचार प्रयोग गर्ने प्रलोभनलाई रोक्न सकिन।
मैले चाँडै घोडाको नालको चुम्बक र शिम ब्रासको टुक्रा भेट्टाएँ।मैले सिम ब्रासलाई चुम्बक र यसको 'किपर' बीचमा राखें र मेरो औंलाले काँसालाई झुकें!
युरेका!यसले काम गर्यो।पीतल मात्र ०.०९ एमएम बाक्लो थियो तर सिद्धान्त स्थापित भयो!
(बायाँको तस्बिर मूल प्रयोगको पुन: निर्माण हो तर यसले उही कम्पोनेन्टहरू प्रयोग गरिरहेको छ)।
म उत्साहित थिएँ किनभने मैले सुरुदेखि नै महसुस गरें कि यदि यो विचारलाई व्यावहारिक रूपमा काम गर्न सकिन्छ भने यसले पाना धातु कसरी बनाउने भन्नेमा नयाँ अवधारणालाई प्रतिनिधित्व गर्नेछ।
भोलिपल्ट मैले मेरो कामका सहकर्मी टोनी ग्रेन्जरलाई मेरो विचारको बारेमा बताएं।उहाँ पनि अलि उत्साहित हुनुहुन्थ्यो र उहाँले मेरो लागि इलेक्ट्रोम्याग्नेटको सम्भावित डिजाइन स्केच गर्नुभयो।उनले विद्युत चुम्बकबाट कस्तो प्रकारको बल प्राप्त गर्न सकिन्छ भन्ने बारे केही गणनाहरू पनि गरे।टोनी सबैभन्दा चतुर व्यक्ति थियो जसलाई मैले चिनेको थिएँ र उहाँलाई सहकर्मीको रूपमा पाउँदा र उहाँको पर्याप्त विशेषज्ञतामा पहुँच पाउँदा म भाग्यशाली थिएँ।
राम्रोसँग सुरुमा यो जस्तो देखिन्थ्यो कि यो विचारले पाना धातुको एकदम पातलो गेजहरूको लागि मात्र काम गर्दछ तर यो मलाई अगाडि बढ्न प्रोत्साहित गर्न पर्याप्त आशाजनक थियो।
प्रारम्भिक विकास:
अर्को केही दिनहरूमा मैले केही स्टिलका टुक्राहरू, केही तामाको तार, र एक रेक्टिफायर प्राप्त गरें र मेरो पहिलो इलेक्ट्रो-चुम्बकीय फोल्डर निर्माण गरें!मसँग अझै पनि मेरो कार्यशालामा छ:

यस मेसिनको इलेक्ट्रो-चुम्बक भाग वास्तविक मूल हो।
(यहाँ देखाइएको अगाडिको पोल र झुकाउने बीम पछि परिमार्जन गरिएको थियो)।
यद्यपि यो मेसिनले कच्चा काम गर्यो!
मेरो मौलिक युरेका पलमा परिकल्पना गरे अनुसार, वास्तवमा क्ल्याम्पिङ बार मेसिनको आधारमा छेउमा, पछाडि वा कहिँ पनि जोडिनु पर्दैन।यसरी मेसिन पूर्णतया खुला र खुला थ्रोटेड थियो।
तर ओपन-एन्डेड पक्ष मात्र पूर्ण रूपमा महसुस गर्न सकिन्छ यदि झुकाउने बीमका लागि टिकाहरू पनि थोरै अपरंपरागत थिए।
आउँदो महिनाहरूमा मैले एक प्रकारको आधा-कपडामा काम गरें जसलाई मैले 'कप-हिन्ज' भनिन्छ, मैले राम्रो प्रदर्शन गर्ने मेसिन (मार्क II) बनाएको थिएँ, मैले अस्ट्रेलियाको पेटेन्ट कार्यालयमा अस्थायी पेटेन्ट स्पेसिफिकेशन दर्ता गरें र म पनि देखा परें। एबीसी टेलिभिजन कार्यक्रम "द आविष्कारकहरू" भनिन्छ।मेरो आविष्कार त्यस हप्ताको लागि विजेताको रूपमा चयन गरिएको थियो र पछि त्यो वर्ष (1975) को लागि फाइनलमध्ये एकको रूपमा चयन गरियो।

बायाँपट्टि मार्क II बेन्डर छ जसलाई सिडनीमा द इन्भेन्टर्सको फाइनलमा देखा परेको थियो।
यसले तल देखाइएको 'कप काज' को थप विकसित संस्करण प्रयोग गर्यो:

1975 मा मैले होबार्ट (3 अगस्त 1975) मा आविष्कारक संघको बैठकमा ज्योफ फेन्टनलाई भेटें।ज्योफलाई "म्याग्नाबेन्ड" आविष्कारमा धेरै चासो थियो र यसलाई नजिकबाट हेर्नको लागि बैठक पछि मेरो ठाउँमा फर्कियो।यो जियोफसँगको चिरस्थायी मित्रता र पछि व्यापार साझेदारीको सुरुवात हुनु थियो।
ज्योफ एक इन्जिनियरिङ स्नातक र एक धेरै चतुर आविष्कारक थिए।उनले मेसिनलाई यसको पूर्ण खुला-अन्त क्षमता महसुस गर्न अनुमति दिने काज डिजाइनको महत्त्व सजिलै देखे।
मेरो 'कप काज' ले काम गर्यो तर 90 डिग्री भन्दा धेरै बीम कोणहरूको लागि गम्भीर समस्याहरू थिए।
ज्योफ केन्द्रविहीन टिकाहरूमा धेरै चासो राखे।काजको यो वर्गले भर्चुअल बिन्दुको वरिपरि पिभोटिंग प्रदान गर्न सक्छ जुन पूर्ण रूपमा काज संयन्त्र बाहिर हुन सक्छ।
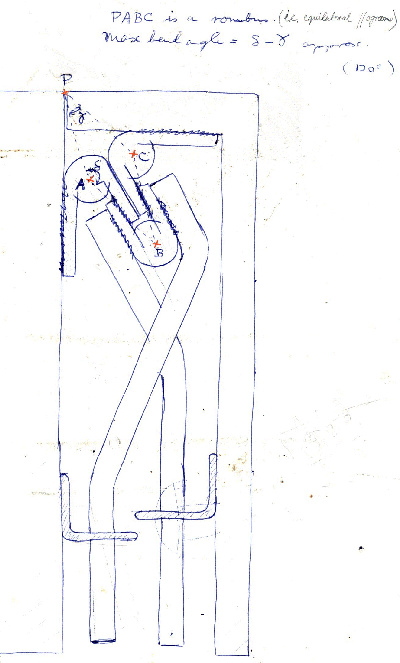
एक दिन (1 फेब्रुअरी 1976) जियोफ असामान्य र अभिनव देखिने काजको रेखाचित्र लिएर आए।म छक्क परें!मैले यो भन्दा टाढा जस्तो केहि देखेको थिइनँ!
(बायाँमा रेखाचित्र हेर्नुहोस्)।
मैले सिकें कि यो परिमार्जित प्यान्टोग्राफ मेकानिजम हो जसमा 4-बार लिङ्केजहरू समावेश छन्।हामीले वास्तवमा यो काजको उचित संस्करण कहिल्यै बनाएका छैनौं तर केही महिना पछि जियोफले हामीले बनाएको सुधारिएको संस्करणको साथ आयो।
सुधारिएको संस्करणको क्रस खण्ड तल देखाइएको छ:
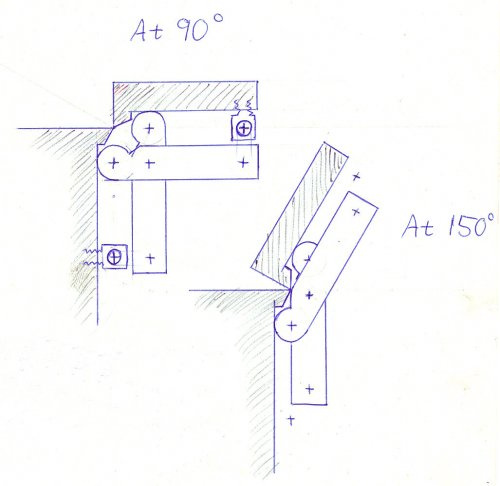
यस काजको 'हातहरू' साना क्र्याङ्कहरूद्वारा मुख्य पिभोटिंग सदस्यहरूसँग समानान्तर राखिन्छन्।यी तलका फोटोहरूमा देख्न सकिन्छ।क्र्याङ्कहरूले कुल कब्जा लोडको एक सानो प्रतिशत मात्र लिनुपर्दछ।
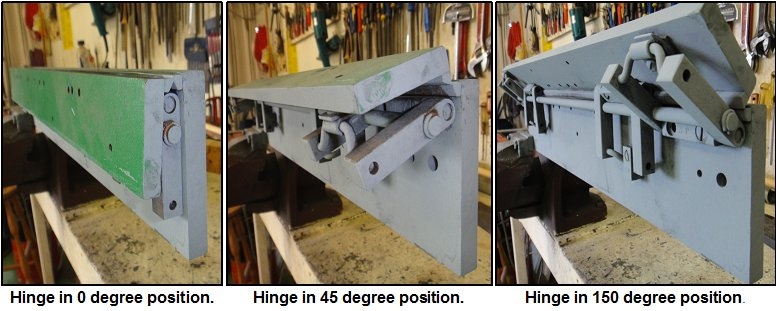
यस संयन्त्रको सिमुलेशन तलको भिडियोमा देखाइएको छ।(यस सिमुलेशनको लागि डेनिस एस्पोलाई धन्यवाद)।
https://youtu.be/wKxGH8nq-tM
यद्यपि यो काज संयन्त्रले राम्रोसँग काम गर्यो, यो वास्तविक म्याग्नाबेन्ड मेसिनमा कहिल्यै स्थापना भएको थिएन।यसको कमजोरीहरू थिए कि यसले झुकाउने बीमको पूर्ण 180 डिग्री रोटेशनको लागि प्रदान गर्दैन र यसमा धेरै भागहरू छन् जस्तो देखिन्छ (यद्यपि धेरै भागहरू एक अर्काको जस्तै थिए)।
यो काज प्रयोग नगर्नुको अर्को कारण यो थियो कि जियोफ त्यसपछि उनको साथ आए:
त्रिअक्षीय काज:
त्रिअक्षीय कब्जाले पूर्ण 180 डिग्री रोटेशनको लागि प्रदान गर्यो र यसलाई कम भागहरू चाहिने भएकाले सरल थियो, यद्यपि भागहरू आफैंमा थप जटिल थिए।
त्रिअक्षीय काजले धेरै चरणहरू मार्फत प्रगति गर्यो एक उचित सेटल डिजाइनमा पुग्नु अघि।हामीले बिभिन्न प्रकारहरूलाई ट्रुनियन काज, गोलाकार आन्तरिक काज र गोलाकार बाह्य काज भनिन्छौं।
गोलाकार बाह्य काज तलको भिडियोमा सिमुलेट गरिएको छ (यस सिमुलेशनको लागि जेसन वालिसलाई धन्यवाद):
https://youtu.be/t0yL4qIwyYU
यी सबै डिजाइनहरू यूएस प्याटेन्ट स्पेसिफिकेशन कागजातमा वर्णन गरिएको छ। (पीडीएफ)।
म्याग्नाबेन्ड काजको सबैभन्दा ठूलो समस्या यो थियो कि यसलाई राख्न कतै थिएन!
मेसिनको छेउ बाहिर छ किनभने हामी मेसिन खुला-एन्डेड होस् भन्ने चाहन्छौं, त्यसैले यो कतै जानुपर्छ।झुकिएको बीमको भित्री अनुहार र चुम्बकको अगाडिको ध्रुवको बाहिरी अनुहारको बीचमा वास्तवमा कुनै ठाउँ छैन।
कोठा बनाउनको लागि हामी झुकेको बीम र अगाडिको पोलमा ओठहरू प्रदान गर्न सक्छौं तर यी ओठहरूले झुकाउने किरणको बल र चुम्बकको क्ल्याम्पिङ बलमा सम्झौता गर्दछ।(तपाईं यी ओठहरू माथिको प्यान्टोग्राफ काजको फोटोहरूमा देख्न सक्नुहुन्छ)।
यसरी काज डिजाइन पातलो हुनु आवश्यक छ ताकि केवल साना ओठहरू आवश्यक पर्नेछ र बाक्लो हुनु आवश्यक छ ताकि यो पर्याप्त बलियो हुनेछ।र भर्चुअल पिभोट प्रदान गर्न केन्द्रविहीन हुनु आवश्यक छ, अधिमानतः चुम्बकको कार्य सतह भन्दा माथि।
यी आवश्यकताहरू धेरै अग्लो अर्डरको मात्रामा थिए, तर जियोफको धेरै आविष्कारशील डिजाइनले आवश्यकताहरूलाई राम्रोसँग सम्बोधन गर्यो, यद्यपि उत्कृष्ट सम्झौताहरू फेला पार्न धेरै विकास कार्यहरू (कम्तीमा 10 वर्षसम्म विस्तार गर्न) आवश्यक थियो।
यदि अनुरोध गरियो भने, म टिकाहरू र तिनीहरूको विकासको बारेमा छुट्टै लेख लेख्न सक्छु तर अहिलेको लागि हामी इतिहासमा फर्कनेछौं:
निर्माण-अधि-लाइसेन्स सम्झौताहरू:
आउँदो वर्षहरूमा हामीले धेरै "निर्माण-अन्डर-लाइसेन्स" सम्झौताहरूमा हस्ताक्षर गर्यौं:
6 फेब्रुअरी 1976: नोभा मेसिनरी Pty लिमिटेड, ओसबोर्न पार्क, पर्थ पश्चिमी अष्ट्रेलिया।
३१ डिसेम्बर १९८२: थाल्म्यान कन्स्ट्रक्सन एजी, फ्राउनफेल्ड, स्विट्जरल्याण्ड।
१२ अक्टोबर १९८३: रोपर व्हिटनी को, रकफोर्ड, इलिनोइस, संयुक्त राज्य अमेरिका।
डिसेम्बर 1, 1983: जोर्ग मेसिन कारखाना, Amersfoort, हल्याण्ड
(यदि कुनै इच्छुक पार्टी द्वारा अनुरोध गरिएको छ भने थप इतिहास)।